Chris Jarrett
Doctoral Candidate
Chris graduated from the University of Auckland in 2014 with a Bachelor of Engineering in Mechatronics. He joined the Medical Devices and Technologies Group in 2015, completing a Masters in Mechanical Engineering. He returned in 2016 to begin his PhD, focusing on the development of robotic exoskeletons for rehabilitation. His research interests include applied control, dynamics and modelling, mechanical design and physical human-robot interaction.
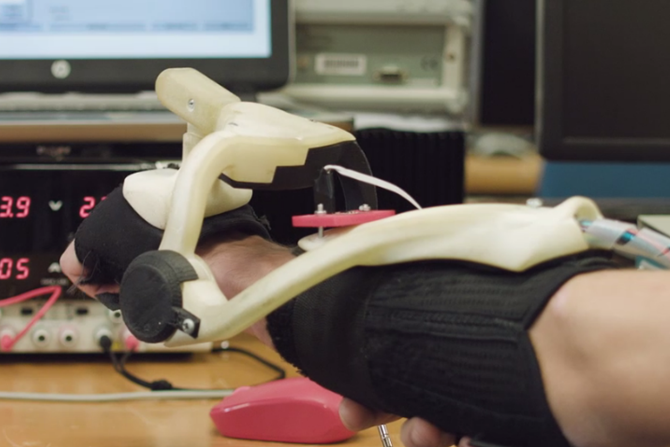
Chris’ research centres on the design of a novel, sensorised robotic joint. The joint is designed as an elastomer-based series elastic actuator (eSEA) and can be retrofitted to a range of exoskeletons. Chris’ early research resulted in the development of a robust torque controller, allowing the eSEA to be used to control human-robot interaction torque. Following this, an accurate model has been developed to use the device to measure joint torque. The eSEA has since been deployed to both elbow and wrist exoskeletons and used in a number of applications including investigation motor learning and instrumented spasticity assessment.
Contact: cjar160@aucklanduni.ac.nz


Selected Publications
Jarrett, C. & McDaid, A. (2019). Modelling and Feasibility of a Series Elastic Actuator as a Haptic Interaction Sensor for Exoskeleton Robotics. IEEE Transactions on Mechatronics.
Jarrett, C. & McDaid, A. (2017). Robust Control of a Cable-Driven Soft Exoskeleton Joint for Intrinsic Human-Robot Interaction. IEEE Transactions on Neural Systems and Rehabilitation Engineering, vol. 25, no. 7, pp. 976-986.
Jarrett, C., & McDaid, A. (2017). Virtual Normalization of Physical Impairment: A Pilot Study to Evaluate Motor Learning in Presence of Physical Impairment. Frontiers in Neuroscience, 11.